Геометрия — 2
В прошлой лекции мы научились работать с точками, векторами, прямыми, отрезками и лучами. В этой лекции мы перейдём к более сложным объектам — многоугольникам. Мы научимся вычислять их площади, проверять принадлежность точки многоугольнику и познакомимся с формулой Пика.
Напомним основные инструменты из прошлой лекции, которыми мы будем пользоваться: скалярное произведение dot, векторное произведение cross, длина вектора length и расстояние между точками.
В этой лекции мы изменим тип координат в структуре Point с int на double. Это связано с тем, что некоторые алгоритмы (например, метод суммы углов или метод лучей со случайным направлением) существенно используют вещественную арифметику. При сравнениях теперь придётся учитывать погрешность и использовать std::abs(x) < eps вместо x == 0.
struct Point {
double x = 0.0;
double y = 0.0;
Point() = default;
Point(double x, double y) : x(x), y(y) {}
};Многоугольники
Многоугольник — часть плоскости, ограниченная замкнутой ломаной.
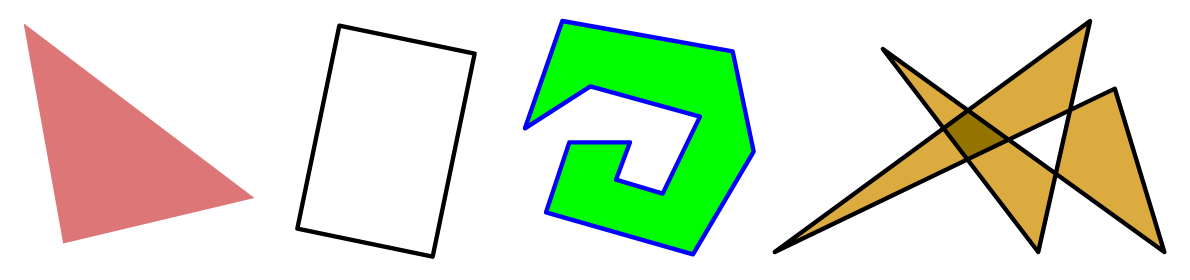
Многоугольник называется простым, если граничная ломаная не имеет самопересечений. На картинке все многоугольники, кроме последнего, простые.
Многоугольник называется выпуклым, если для любых его двух точек весь отрезок между ними целиком лежит внутри многоугольника. На картинке первые два многоугольника выпуклые.
Выпуклый многоугольник называется правильным, если у него все стороны и все углы равны. Все правильные многоугольники можно вписать в окружность; обратное неверно.
В трёхмерном пространстве обобщением многоугольника является многогранник.
В программировании многоугольник естественно хранить как последовательность вершин в порядке обхода:
std::vector<Point> polygon;Площади
Площадь треугольника
Из прошлой лекции мы знаем, что модуль векторного произведения двух векторов равен площади параллелограмма, натянутого на них. Площадь треугольника — половина этого параллелограмма:
\[ S_{\triangle ABC} = \frac{1}{2} \cdot |(B - A) \times (C - A)| \]
Без модуля получается ориентированная площадь: положительная, если обход \(A \to B \to C\) идёт против часовой стрелки, и отрицательная — если по часовой стрелке.
double triangleArea(Point a, Point b, Point c) {
return std::abs(cross(b - a, c - a)) / 2.0;
}Площадь произвольного многоугольника
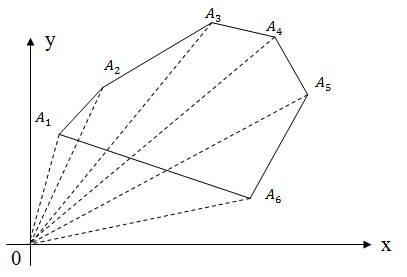
Для произвольного многоугольника, заданного последовательностью вершин \(A_1, A_2, \dots, A_n\) в порядке обхода, используется формула площади Гаусса (также называется формулой шнурования, англ. shoelace formula):
\[ S = \frac{1}{2} \left| \sum_{i=1}^{n} A_i \times A_{i+1} \right| \]
где \(A_{n+1} = A_1\) (обход замкнутый).
Идея вывода. Зафиксируем начало координат \(O = (0, 0)\) и рассмотрим серию треугольников \(OA_iA_{i+1}\) для каждого ребра многоугольника. Площадь такого треугольника с учётом знака равна \(\frac{1}{2} A_i \times A_{i+1}\) (радиус-векторы \(A_i\) и \(A_{i+1}\) играют роль двух сторон треугольника из начала координат).
Когда мы суммируем эти ориентированные площади, области вне многоугольника учитываются с противоположными знаками и сокращаются — остаётся именно площадь многоугольника. Формула работает для любого простого многоугольника, в том числе невыпуклого.
Знак результата зависит от направления обхода (по часовой или против). Поэтому в формуле мы берём модуль. Сам знак, впрочем, тоже полезен — по нему можно определить ориентацию многоугольника.
Как реализовать. Функция должна пройти по всем парам соседних вершин (включая пару последняя–первая), накапливая сумму векторных произведений:
double polygonArea(const std::vector<Point>& p) {
int n = (int) p.size();
double s = 0.0;
for (int i = 0; i < n; ++i) {
Point a = p[i];
Point b = p[/* индекс следующей вершины циклически */];
s += /* векторное произведение радиус-векторов a и b */;
}
return std::abs(s) / 2.0;
}Приём для циклического перехода: (i + 1) % n — когда i == n - 1, результат равен \(0\), и мы возвращаемся к первой вершине. Этот приём пригодится практически во всех дальнейших алгоритмах.
Метод трапеций как альтернатива
Есть и более интуитивный (но более громоздкий) способ — метод трапеций. Мы так же проходимся по всем рёбрам, но теперь складываем ориентированные площади не треугольников с началом координат, а трапеций с основанием на оси \(Ox\):
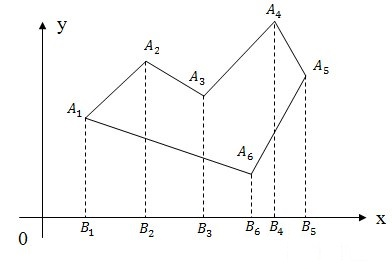
«Нижние» трапеции при обходе по часовой стрелке имеют отрицательный знак и сокращают лишнюю площадь «верхних». Площадь одной трапеции на ребре \((A_i, A_{i+1})\):
\[ S_{\text{трап}} = \frac{(y_i + y_{i+1})}{2} \cdot (x_{i+1} - x_i) \]
Формула Гаусса и метод трапеций дают один и тот же ответ.
Целочисленные координаты
Из формулы для площади треугольника следует важное наблюдение: если все координаты вершин целые, то площадь любой фигуры будет либо целым, либо полуцелым числом (т.е. числом с \(2\) в знаменателе).
Если в задаче все входные координаты целые, часто имеет смысл заранее удвоить их (или работать с удвоенной площадью) — тогда все промежуточные значения останутся целыми, и можно не беспокоиться о погрешностях плавающей точки.
Принадлежность точки многоугольнику
Точка в треугольнике
Начнём с простого случая — проверить, находится ли точка \(P\) внутри треугольника \(ABC\), заданного против часовой стрелки.
Идея: точка лежит внутри треугольника тогда и только тогда, когда она находится «слева» от всех трёх рёбер. «Слева» — потому что обход против часовой стрелки. Признак «слева» выражается знаком векторного произведения:
\[ P \in \triangle ABC \iff \begin{cases} (B - A) \times (P - A) \geq 0 \\ (C - B) \times (P - B) \geq 0 \\ (A - C) \times (P - C) \geq 0 \end{cases} \]
Если все три произведения строго положительные — точка строго внутри. Если какое-то из них равно нулю — точка лежит на соответствующем ребре.
Поскольку координаты теперь double, сравнения с нулём стоит делать с погрешностью: x > -eps вместо x >= 0. Типичное значение eps для таких задач — \(10^{-9}\).
bool pointInTriangle(Point p, Point a, Point b, Point c) {
const double eps = 1e-9;
double c1 = cross(b - a, p - a); // знак относительно ребра AB
double c2 = /* аналогично для ребра BC */;
double c3 = /* аналогично для ребра CA */;
return c1 > -eps && c2 > -eps && c3 > -eps;
}Два оставшихся выражения пишутся по тому же образцу, что и первое. Обратите внимание: если обход треугольника задан по часовой стрелке, все знаки будут обратными — тогда нужно проверять c1 < eps && c2 < eps && c3 < eps.
Точка в выпуклом многоугольнике
Идея обобщается на произвольный выпуклый многоугольник. Если вершины обходятся против часовой стрелки, точка внутри тогда и только тогда, когда она «слева» от всех рёбер:
bool pointInConvex(Point p, const std::vector<Point>& poly) {
const double eps = 1e-9;
int n = (int) poly.size();
for (int i = 0; i < n; ++i) {
Point a = poly[i];
Point b = poly[(i + 1) % n];
double v = /* векторное произведение векторов AB и AP */;
if (v < -eps) {
return /* точка справа от ребра — ... */;
}
}
return /* прошли все рёбра — ... */;
}Проверка на выпуклость
Чтобы проверить, является ли многоугольник выпуклым, достаточно пройтись по всем тройкам соседних вершин \((a, b, c)\) и убедиться, что мы всегда «поворачиваем» в одну и ту же сторону. Это значит, что знак векторного произведения \((b - a) \times (c - b)\) не меняется вдоль всего обхода:
bool isConvex(const std::vector<Point>& poly) {
int n = (int) poly.size();
int sign = 0; // знак первого ненулевого векторного произведения
for (int i = 0; i < n; ++i) {
Point a = poly[i];
Point b = poly[(i + 1) % n];
Point c = poly[/* индекс вершины через одну циклически */];
double v = cross(b - a, c - b);
if (v > 0) {
if (sign < 0) return false; // встретили разные знаки
sign = 1;
} else if (v < 0) {
if (/* ... */) return false;
sign = -1;
}
// случай v == 0 пропускаем: три точки на одной прямой
}
return true;
}Основные места для заполнения: индекс третьей вершины (i + 2) % n и симметричная проверка смены знака в ветке v < 0.
Точка в произвольном многоугольнике
Для невыпуклых многоугольников проверка «слева от всех рёбер» не работает. Есть два стандартных подхода, оба за \(O(n)\) для одного запроса.
Метод суммы углов
Пройдёмся по всем вершинам многоугольника в порядке обхода и для каждой пары соседних вершин \(A_i\), \(A_{i+1}\) вычислим ориентированный угол, под которым отрезок \(A_i A_{i+1}\) виден из точки \(P\). Сумма этих углов по всем рёбрам:
\[ \theta = \sum_{i=1}^{n} \angle(A_i - P,\ A_{i+1} - P) \]
обладает замечательным свойством:
- \(|\theta| \approx 2\pi\) — точка внутри многоугольника
- \(\theta \approx 0\) — точка снаружи
Почему это работает: когда \(P\) внутри, луч \(P \to A_i\) делает полный оборот при обходе многоугольника, поэтому сумма углов равна \(\pm 2\pi\). Когда \(P\) снаружи, направление «отклоняется» и возвращается назад, итог — ноль.
Ориентированный угол между двумя векторами мы умеем считать из прошлой лекции:
double angleBetween(Point a, Point b) {
return std::atan2(cross(a, b), dot(a, b));
}bool pointInPolygonAngle(Point p, const std::vector<Point>& poly) {
int n = (int) poly.size();
double total = 0.0;
for (int i = 0; i < n; ++i) {
Point a = poly[i];
Point b = poly[(i + 1) % n];
total += /* угол, под которым отрезок ab виден из p, через angleBetween */;
}
return std::abs(total) > /* порог между 0 и 2*pi */;
}В роли порога сравнения подойдёт любое значение строго между \(0\) и \(2\pi\) — например, \(\pi\): так мы отличаем сумму углов, близкую к \(\pm 2\pi\) (точка внутри), от суммы, близкой к \(0\) (снаружи).
Метод лучей
Второй метод: проведём из точки \(P\) произвольный луч и посчитаем, сколько раз он пересекает границу многоугольника.
Ключевое наблюдение: если точка внутри многоугольника, луч выйдет наружу нечётное число раз («внутри → снаружи → внутри → снаружи»); если снаружи — чётное число раз.
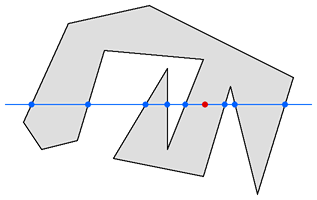
Чтобы избежать вырожденных случаев (луч проходит ровно через вершину или вдоль ребра), удобно взять луч в случайном направлении. Вероятность, что он случайно совпадёт с какой-то особой точкой, пренебрежимо мала.
bool pointInPolygonRay(Point p, const std::vector<Point>& poly) {
Point d = {1.7, 2.3}; // "некрасивое" направление луча, чтобы избежать вырожденных случаев
int n = (int) poly.size();
int crossings = 0;
for (int i = 0; i < n; ++i) {
Point a = poly[i];
Point b = poly[(i + 1) % n];
if (/* луч p + t*d (t >= 0) пересекает отрезок [a, b] */) {
++crossings;
}
}
return crossings % 2 == /* остаток, соответствующий "точка внутри" */;
}Проверку пересечения луча с отрезком удобно вынести в отдельную функцию. Её можно свести к уже знакомой задаче пересечения двух прямых из прошлой лекции — надо только дополнительно проверить, что параметр \(t\) на луче неотрицательный, а параметр \(s\) на отрезке лежит в \([0, 1]\):
bool raySegmentIntersect(Point p, Point d, Point a, Point b) {
// p + t * d = a + s * (b - a), где t >= 0 и s in [0, 1]
// это система из двух уравнений (по одному на каждую координату)
// относительно двух неизвестных t и s — решите её, как в прошлой лекции
// вернуть true, если t >= -eps и 0 - eps <= s <= 1 + eps
}Формула Пика
Для многоугольника, все вершины которого имеют целые координаты, существует изящная формула, связывающая его площадь с числом целочисленных точек:
\[ S = V + \frac{E}{2} - 1 \]
где
- \(V\) — количество целочисленных точек внутри многоугольника,
- \(E\) — количество целочисленных точек на границе многоугольника (включая вершины).
Пример. Рассмотрим квадрат с вершинами \((0, 0)\), \((3, 0)\), \((3, 3)\), \((0, 3)\).
- Площадь: \(S = 9\)
- Внутренние целочисленные точки: \((1, 1), (1, 2), (2, 1), (2, 2)\), итого \(V = 4\)
- Точки на границе: по \(4\) точки на каждой стороне (включая один конец), итого \(E = 12\)
Проверяем формулу Пика: \(V + \frac{E}{2} - 1 = 4 + 6 - 1 = 9\) — совпадает с прямым расчётом площади.
Формула полезна в задачах, где просят найти количество целочисленных точек внутри многоугольника: если мы можем вычислить \(S\) и \(E\) (что несложно — количество точек на отрезке \((x_1, y_1)\)—\((x_2, y_2)\) равно \(\gcd(|x_2 - x_1|, |y_2 - y_1|) + 1\)), то \(V\) находится из формулы Пика.
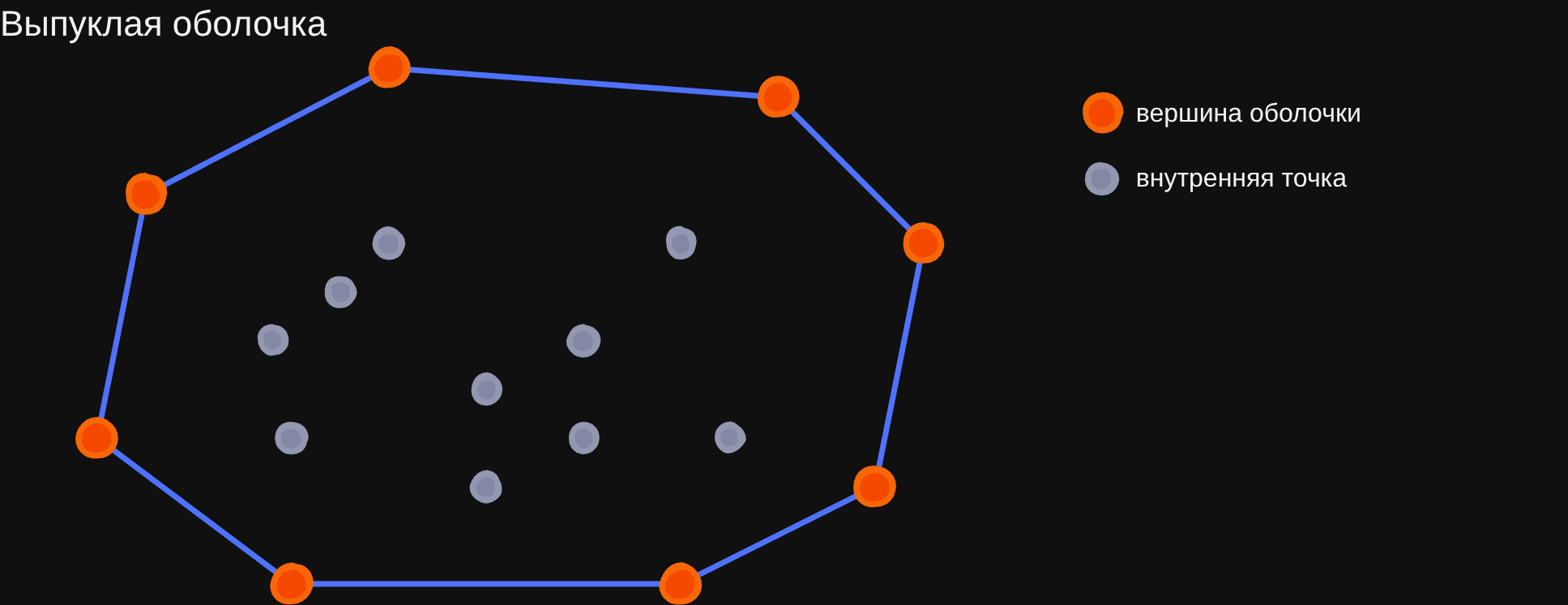
Выпуклая оболочка (опционально)
Выпуклой оболочкой множества точек называется наименьший выпуклый многоугольник, содержащий все эти точки. Представьте, что точки — это гвозди на доске; выпуклая оболочка — это то, как натянется резинка, наброшенная на них.
Выпуклая оболочка — один из центральных объектов вычислительной геометрии. Существуют алгоритмы её построения за \(O(n \log n)\): обход Грэхема (Graham scan), алгоритм Эндрю (Andrew’s monotone chain), обход Джарвиса (Jarvis march, за \(O(nh)\), где \(h\) — число вершин оболочки).
Типичные применения:
Проверка принадлежности точки набору точек (достаточно проверить, что точка лежит внутри выпуклой оболочки — за \(O(\log n)\) с предпосчитанной оболочкой).
Нахождение диаметра множества точек (самой дальней пары).
Задачи о пересечении полуплоскостей.
Подробное изложение алгоритмов выходит за рамки нашего курса, но рекомендуем ознакомиться с ними самостоятельно — это интересная и полезная тема.